Assistenz System (MODEAS)
Die Leistungsfähigkeit und die Verfügbarkeit kleiner Drohnen bzw. UAVs (Unmanned Aerial Vehicles) sind in den letzten Jahren rasant angestiegen. Sie sind relativ preiswert, einfach zu beschaffen und einzusetzen. Leider werden sie auch immer häufiger missbraucht - auch von Kriminellen und Terroristen. Um diese Gefahren zu entgegnen, muss man wissen, welche Möglichkeiten dafür existieren und wann welche Maßnahmen effizient sein können.
Gefahren und Missbrauchspotential kleiner Drohnen
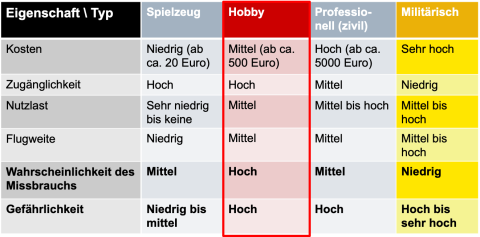
Wie gefährlich eine Drohne werden kann, hängt von der konkreten Situation und mehreren Faktoren ab. Die wichtigsten Faktoren sind in der Abb. 1 aufgeführt. Während billige Spielzeugdrohnen auf Grund ihrer geringen Fähigkeiten keine große Gefahr darstellen, ändert sich die Situation bereits im unteren Preissegment der Hobbydrohnen dramatisch. Relativ hohe Nutzlasten, Geschwindigkeiten, Reichweiten und Betriebszeiten mit einer Akkuladung machen solche Systeme gefährlich. Professionelle zivile und militärische Drohnensysteme verfügen über noch umfangreichere Leistungsmerkmale, sind aber für die meisten Straftaten nicht erforderlich. Zudem sind solche Systeme für die meisten potenziellen Straftäter nicht erschwinglich bzw. nicht verfügbar.
Bei der missbräuchlichen Verwendung von Drohnensystemen unterscheidet man grob drei Kategorien:
- Eine Störung ohne bewusste Verletzung der Gesetze: hierzu zählen „Kinderstreiche“ und Aktivitäten, die zufällig oder beabsichtigt scheinbar harmlose Aktionen durchführen wie z. B. Großveranstaltungen oder landende Flugzeuge zu beobachten.
- Gesetzeswidrige Handlungen: Hierbei handelt es sich um bewusste Straftaten, wie z. B. Fliegen in Flugverbotszonen, Spionage, Erkundung und Ausspähung von Privatgrundstücken oder Firmengeländen, Schmuggel, Transport von Drogen, Mobiltelefonen oder Waffen in JVAs, aber auch Diebesgut und Hilfsmitteln. Solche Straftaten zielen zumeist nicht darauf ab, Personen zu gefährden.
- Eine beabsichtigte Bedrohung: Anschläge auf Personen und Objekte fallen in diese Kategorie.

dargestellt)
Detektion kleiner Drohnen
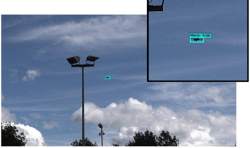
Da die Drohnen i.d.R. klein sind (siehe Abb. 2), unterschiedlich aussehen, die Sichtlage oder Sichtverhältnisse nicht immer gut sind, kann selbst ein geschultes Auge diese Objekte nicht frühzeitig detektieren, um die entsprechenden Abwehrmaßnahmen einzuleiten. Dafür sind Drohnenabwehrsysteme notwendig, die die folgenden funktionellen Eigenschaften umfassen:
- Früherkennung (Detektion),
- Lokalisierung,
- Klassifikation und
- Identifikation.
- Auch Abwehrmaßnahmen könnten automatisiert eingeleitet werden.
Es gibt keinen ultimativen „Drohnensensor“. Vielmehr sind Drohnen nur detektierbar, wenn man mehrere geeignete Verfahren verwendet und miteinander verknüpft. Es ist übrigens zu berücksichtigen, dass nicht alle Sensoren überall und zu jeder Zeit eingesetzt werden dürfen. Die aktuelle Rechtsprechung erlaubt dies nur für bestimmte Sensoren (z.B. Hochfrequenz und Radar) beim regulären Monitoring und für weitere Sensoren (visuell optisch und akustisch) nur im Gefahrenfall.In Tabelle 1 ist ein Vergleich unterschiedlicher Technologien zur Drohnendetektion enthalten, die weiter ausführlicher vorgestellt werden.

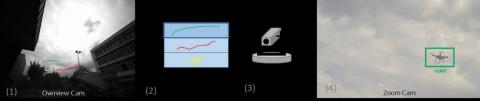
Videobasierte Detektion und Klassifikation erfolgen mithilfe mehrerer optischen Sensoren meistens zweistufig:
1. Eine oder mehrere Übersichtskameras überwachen das Areal und detektieren fliegende Objekte. Diese werden getrackt und anhand ihrer Position
2. mit einer Zoomkamera vergrößert, so dass die Objekte klassifiziert und identifiziert werden können.
Ein zusätzlicher Vorteil optischer Detektionstechnologie besteht in der Möglichkeit, die Ladung der Drohne zu erkennen. Bei einer Gefahrenabschätzung ist es wichtig zu wissen, ob eine Drohne eine „Standarddrohne“ aus dem Handel ist und „nur“ eine Kamera trägt oder manipuliert wurde. Im Gegenzug sind damit Restriktionen hinsichtlich Reichweite, Genauigkeit und Detektionszeitpunkt verbunden. Das Flugobjekt muss in Sichtweite hinreichend groß und vor seinem Hintergrund gut erkennbar sein, damit eine frühzeitige Detektion funktioniert.
Radarbasierte Detektion: Aktive Radare strahlen i. d. R. modulierte elektromagnetische Wellen ab und analysieren deren Reflexionen von bestrahlten Objekten. Durch die Zeitmessung bis zur detektierten Reflexion kann ein Radar die Objektentfernung bestimmen. Weil drehende Rotoren einer Drohne spezifische Frequenzänderungen reflektierter Strahlen (Dopplereffekt) bewirken, können manche Radarsysteme Drohnen mit Rotoren von anderen Flugobjekten (wie z. B. Starrflügler mit Reaktivantrieb oder Vögel) gut unterscheiden. Passive Radare analysieren Reflexionen sowie Frequenzänderungen elektromagnetischer Wellen, die von vorhandenen Quellen, wie Rundfunk- und Mobilfunksender, ausgesendet werden, um Objekte zu lokalisieren.
Akustische Detektion basiert auf Analyse der Geräusche, die fliegende Drohnen verursachen und können sie mithilfe mehrerer Sensoren via Triangulation auch orten. Mitunter können durch akustische Spektralanalysen auch Drohnentypen bestimmt werden. Es gibt auch akustische Radare (Sonare und Sodare genannt), die Echos von aktiv ausgesendeten akustischen Signalen analysieren, um Objekte zu orten. Solche Systeme können aber wegen der relativ geringen Schallgeschwindigkeit (ca. 340 m/s in Luft) weit entfernte oder schnell fliegende Objekte nur ungenau orten.
Funkbasierte Detektion: In vielen Angriffsszenarien kann eine Drohne in wenigen hundert Metern von ihrem Angriffsziel gestartet werden, sodass sie ihr Ziel in wenigen Flugsekunden erreichen kann. Abhilfe können hier spezielle Funksensoren schaffen, die die Kommunikationssignale zwischen Drohne und Drohnenpiloten (bzw. der Fernsteuerung) erkennen und nicht nur die Drohne, sondern auch den Piloten bzw. die Funkfernsteuerung bereits vor dem Start lokalisieren können. Handelsübliche Drohnen brauchen i. d. R. einige Minuten bis sie nach dem Einschalten startbereit sind. Ein technisch versierter Pilot kann aber diese Zeit verkürzen oder die Drohne gar ohne Funksteuerung starten. Es gibt auch Drohnen, die über mobile Funknetze gesteuert werden, sodass situationsabhängig verschiedene Technologien eingesetzt werden müssen.
Entscheidungsunterstützung: Neben der Detektion und Klassifikation von UAVs kommt der Einschätzung der aktuellen Gefährdungslage durch das Sicherheitspersonal eine große Bedeutung zu. Als zentrales Hilfsmittel dient hierzu eine automatische Erkennung sowie spezielle Visualisierung der momentanen Situation mit dem Ziel, die wesentlichen Aspekte der aktuellen Lage ergonomisch darzustellen und die dafür nicht wichtigen Details wegzulassen, so dass die Verantwortlichen bei einer raschen Entscheidungsfindung unterstützt werden.

MODEAS – Ein multisensorielles Drohnendetektionssystem
MODEAS ist ein Modulares Drohnen Erfassungs- und Assistenz System, das neben der Detektion und Klassifikation von angreifenden Drohnen auch eine geeignete Visualisierung anbietet, um den Entscheider zur Auswahl der Abwehrmaßnahmen zu unterstützen. Das MODEAS Experimentalsystem wurde am Fraunhofer IOSB entwickelt und besteht aktuell aus zwei vernetzten Sensorstationen – Radar und Optisch - und einer Zentrale. Weitere Sensoren wie z.B. Funk oder Akustik können zusätzlich ins System integriert werden, so dass durch Fusion der Detektionen aller Sensoren die Präzision des Ergebnisses verbessert wird.
In Abb. 3 ist die optische Sensorstation von MODEAS dargestellt. Die optische Detektionskette ist in der Lage, sehr kleine Punktziele (1-2 Pixel) mit einer Übersichtskamera zu detektieren, die Schwenk-Neige-Einheit mit montierter Zoomkamera (PTZ - System) auf ein Objekt von Interesse auszurichten und dieses in einer hochaufgelösten Bildansicht mittels Verfahren der Künstlichen Intelligenz (KI) zu klassifizieren (siehe Abb. 4).
Hiermit werden eine schritthaltende Detektion und Klassifikation ermöglicht.
In Abb. 6 ist ein Klassifikationsergebnis (Bestimmung des Drohnentyps) dargestellt. Eine Drohne des Typs „DJI Mavic“ wird mit einer Güte von 66 klassifiziert, wobei die Güte das Vertrauensmaß der Klassifikation angibt.
Neben der Drohnentyp ist auch die Erkennung von Nutzlast in MODEAS möglich, was ein wichtiges Indiz hinsichtlich der potentiellen Gefährlichkeit der Drohne darstellt.

dem Spotter (rechts)
Das Ergebnis der Erstdetektion ist in Abb. 5 dargestellt. Die Drohne (türkis eingefärbt) wird von Vögeln und Baumzweige-Artefakten (grün eingefärbt) im optischen Bild unterschieden und vom System sowohl mit einer Bewegungskurve in der Übersichtskamera, als auch mit der PTZ-Einheit verfolgt.
Qualitative Ergebnisse
MODEAS setzt nicht nur optische Sensoren zur Drohnendetektion ein, sondern auch ein Radar, der Drohnen von Vögeln unterscheiden kann. Um Falschdetektionen zu vermeiden, werden diese Detektionen ebenso mit der PTZ-Einheit angefahren und mithilfe von KI-basierten Verfahren überprüft.
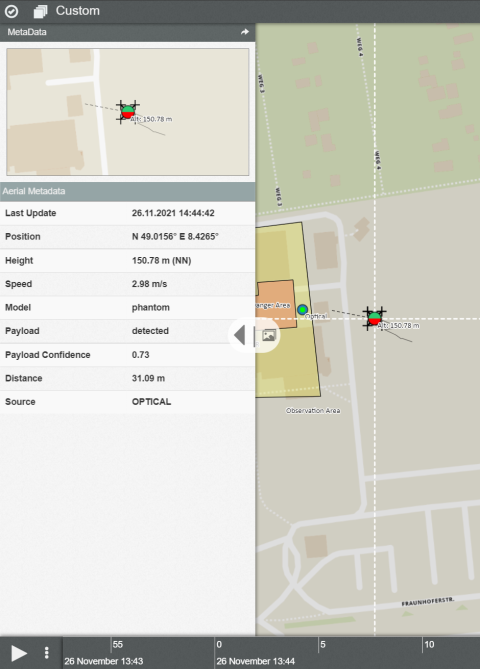
Die Ergebnisse der Detektion und Klassifikation aller Sensortypen werden verifiziert und fusioniert, um Fehler zu minimieren und dem Entscheider visuell zur Verfügung gestellt (siehe Abb. 7).
Gegenmaßnahmen und deren Einsatz
Die Früherkennung alleine reicht oft nicht aus, um mögliche Schäden eines Drohnenangriffs vorzubeugen oder zu minimieren. Die Entscheidung über geeignete Abwehrmaßnahmen spielt dabei eine wichtige Rolle. Ein Assistenzsystem zur Hilfestellung ist an dieser Stelle von zentraler Bedeutung, weil die Zeit für solche Entscheidungen i. d. R. sehr knapp ist – oft nur wenige Sekunden.
Man kann grundsätzlich
- passive Abwehrmaßnahmen einleiten, wie z. B. bauliche Maßnahmen, Auslösung eines Alarms oder
- aktive Maßnahmen ergreifen, wofür mehrere Entscheidungskriterien und technische Anforderungen erfüllt sein müssen. Ein aktiver Eingriff muss rechtlich zulässig und von der Verhältnismäßigkeit her sorgfältig abgewogen sein. Außerdem spielen mögliche Verstöße gegen die Luftverkehrsordnung und die Regelung zur Notwehr und Selbsthilfe eine ebenso wichtige Rolle.
Passive Maßnahmen sind immer sinnvoll, aber in kritischen Fällen sind aktive Bekämpfungsmaßnahmen erforderlich. Man unterscheidet bei den aktiven Maßnahmen zwischen weichen und harten Methoden.
Weiche Maßnahmen: Das Stören der Funkverbindung gilt als weiche Methode und kann auf zwei Arten erfolgen:
1. Durch „Jamming“ wird die Funkverbindung zwischen Drohne und Fernsteuerung gestört.
2. Beim „Spoofing“ werden falsche Satellitennavigationssignale generiert, um den Kurs der Drohne zu manipulieren.
Die beste funktechnische Abwehrlösung wäre die Übernahme der Steuerung, was jedoch einen sehr hohen technischen Aufwand erfordert.
Harte Maßnahmen: Als harte Abwehr wird ein physisches „Abfangen“ oder eine solche Beschädigung der Drohne bezeichnet, die ihren Weiterflug verhindert. Diese Art von Eingriffen kann auch unbeteiligte Personen und Sachwerte gefährden. Zum Einsatz können z. B. Laser, hochenergetische elektromagnetische Pulse (z.B. High Power Microwaves – HPM), Wasserwerfer, Flammenwerfer, starker Schall, Abfangnetze, Schusswaffen oder Raketensysteme kommen. Ferner bieten sich Abfangdrohnen an. Bei jeder erfolgreichen harten Abwehrmaßnahme ist es zumeist schwer abzuschätzen, wo die Drohne (oder Teile davon) abstürzt und welche Schäden dabei auftreten können.
Einsatz der Gegenmaßnahmen: Wurde eine Drohne rechtzeitig detektiert, klassifiziert und als gefährlich eingestuft, müssen situationsabhängig die effizientesten Maßnahmen schnell ausgewählt und eingeleitet werden. Dabei sind Nutzen und Risiken solcher Eingriffe sorgfältig abzuwägen, damit mögliche Kollateralschäden nicht unverhältnismäßig in Relation zum Nutzen stehen. In zivilen Anwendungen sind grundsätzlich passive und weiche Abwehrmaßnahmen zu bevorzugen. Eine Ortung von Drohnenpiloten ist in diesem Fall am sinnvollsten, weil der Drohnenpilot schnell gefasst werden kann und dadurch keine unbeteiligten Personen gefährdet werden.
Alle funkbasierten Abwehrmaßnahmen funktionieren nur dann, wenn die Drohne tatsächlich funkgesteuert wird, was nicht immer der Fall ist und sein wird.
Zusammenfassung
Die Bedeutung von Gefahren durch Drohnen wird sowohl für die öffentliche als auch für die private Sicherheit immer höher. Um diesen Gefahren zu entgegnen, kann ein geeignetes Drohnendetektionssystem ausgesucht und eingesetzt werden. Die am Markt verfügbaren Systeme decken leider nur einige meistens spezielle Anwendungsfälle ab. Lösungen, die in allen Situationen eine frühzeitige Detektion aller Drohnentypen ohne Sichtkontakt zu einem sehr frühen Zeitpunkt und in großer Entfernung garantieren, sind nicht verfügbar.
Die Entscheidungsfindung hinsichtlich geeigneter Abwehrmaßnahmen sollte durch eine integrierte Interaktionskomponente zur Lagevisualisierung, Situationseinschätzung und Risikoanalyse unterstützt werden. Die Entscheidung und die Verantwortung liegen jedoch bei den Anwendern der Systeme, eine automatische Handlung ist in zivilem Bereich nicht zulässig.
Crisis Prevention 4/22
Dr.-Ing. Alina Lindner
Fraunhofer IOSB, Karlsruhe
Projektleiterin "Automatisierte Videoanalyse und Bildauswertung"
E-Mail: Alina.Lindner@iosb.fraunhofer.de, www.iosb.fraunhofer.de
Dr.-Ing. Igor Tchouchenkov
Fraunhofer IOSB, Karlsruhe, Leiter der Gruppe „Verteilte Systeme“
Fraunhoferstr. 1, 76131 Karlsruhe, Germany
E-Mail: Igor.Tchouchenkov@iosb.fraunhofer.de, www.iosb.fraunhofer.de











