Es ist leichter als je zuvor, auch ohne spezielle Vorkenntnisse, an Anleitungen zum Bauen von Bomben aus alltäglichen Dingen zu kommen – und die aktuelle Bedrohungslage spiegelt das sowohl im Kontext von Terrorismus als auch kriminellen Aktivitäten wider. Wird ein verdächtiges Objekt gefunden, sehen sich die Einsatzkräfte vor Ort oftmals mit einer unklaren Gefahrenlage konfrontiert und müssen innerhalb kürzester Zeit und unter hohem Verantwortungsdruck eine Entscheidung treffen.
Das Ziel des bilateralen Projekts DURCHBLICK1 ist es, den Entschärfern neue Werkzeuge und eine effizientere Darstellung der gewonnenen Informationen mit Hilfe von innovativen bildgebenden und analytischen Verfahren zugänglich zu machen. Dabei werden auch ausführlich ethische und rechtliche Fragen betrachtet. Ziele sind die Erhöhung der Sicherheit von Einsatzkräften, Unbeteiligten und kritischer Infrastruktur sowie eine effizientere Strafverfolgung.
Motivation
Nach den Attentaten von Brüssel, Paris und Manchester sowie den Terrorwarnungen in europäischen Großstädten in jüngster Zeit ist die Bedrohung durch Terrorismus stark ins Bewusstsein der Bevölkerung gerückt. Die zunehmend leichte Verfügbarkeit von Anleitungen zur Herstellung von USBV² im Internet ermöglicht es auch Amateuren, funktionierende Sprengsätze für terroristische Zwecke, aber auch zum Einsatz mit krimineller Intention zu bauen, etwa zum Aufsprengen von Automaten.
Auffällige Objekte werden häufiger von Passanten oder anderen Personen gemeldet. Nur zu einem geringen Anteil werden tatsächlich USBV aufgefunden, doch müssen die Sicherheits- und Einsatzkräfte in Deutschland und Österreich in der Lage sein, verdächtige Objekte wie nicht zuzuordnende Gepäckstücke, manipulierte Mülleimer, Gasflaschen oder umfunktionierte Pyrotechnik schnell, zuverlässig und mit einem möglichst geringen Eigenrisiko zu untersuchen.
Vor Ort befinden sich die Einsatzkräfte in einer Zwickmühle: Auf der einen Seite steht die Eigensicherung sowie die Sicherheit von Unbeteiligten und unter Umständen auch die Sicherheit kritischer Infrastrukturen, auf der anderen Seite entstehen durch Sperrungen und Behinderungen hohe Kosten. Die Verantwortung für die Entscheidung über das richtige Vorgehen liegt beim Entschärferteam selbst – und um diese Entscheidung treffen zu können, benötigen die Einsatzkräfte möglichst schnell möglichst vielfältige und eindeutige Informationen über den verdächtigen Gegenstand.
Gerade in Situationen, in denen es Hinweise auf einen terroristischen Hintergrund gibt, wird dafür in der Regel ein Robotersystem eingesetzt, um mit reduzierter Eigengefährdung an relevante Informationen zu gelangen.
Doch oftmals sind die verdächtigen Objekte nicht besonders roboterfreundlich positioniert: Steht zum Beispiel ein Koffer in einer Ecke, in einem Schließfach oder liegt flach auf dem Boden, kann das Standardwerkzeug der Entschärfer – das klassische Transmissionsröntgen (bestehend aus Röntgenquelle und Durchleuchtungsdetektor) – in der Regel nicht oder nur eingeschränkt angewandt werden. Ein Detektor lässt sich dann nämlich nicht hinter oder unter dem Gegenstand platzieren, ohne ihn zu bewegen. Und das ist etwas, das Einsatzkräfte vermeiden wollen, bevor sie wissen, was sich darin befindet. Solch ungeklärte Situationen bedeuten ein enormes Risiko sowohl für die Einsatzkräfte als auch für die Umgebung.
Lösungsansatz
An diesem Punkt setzt das zweijährige deutsch-österreichische Projekt DURCHBLICK an, das im Mai 2017 gestartet ist. In Deutschland wird es vom Bundesministerium für Bildung und Forschung (BMBF) gefördert und von der VDI Technologiezentrum GmbH (VDI TZ) betreut. In Österreich ist das Projekt finanziert im Sicherheitsforschungs-Förderprogramm KIRAS vom Bundesministerium für Verkehr, Innovation und Technologie (bmvit), die Österreichische Forschungsförderungsgesellschaft (FFG) ist Projektträger. Vonseiten der Einsatzkräfte sind auf österreichischer Seite das Bundesministerium für Landesverteidigung (BMLV) und auf deutscher Seite das Landeskriminalamt Baden-Württemberg (LKA BW), das Bundeskriminalamt (BKA) und die Bundespolizei (BPOL) beteiligt.
Die Leistungsfähigkeit der robotergestützten Sensoriksysteme und die Qualität der dadurch gelieferten Informationen sind Schlüsselfaktoren dabei, wie sicher und effektiv die potenzielle Bedrohung erkannt und im Falle einer tatsächlichen Gefahr charakterisiert und schließlich entschärft werden kann. Dabei kann auf die Erkenntnisse aus erfolgreichen BMBF-geförderten Forschungsprojekten wie zum Beispiel USBV-Inspektor zurückgegriffen werden, das den Einsatz von Terahertzradar für diesen Einsatzzweck untersucht hat. DURCHBLICK führt diese Forschungsansätze weiter und hat zum Ziel, neuartige Sensorsysteme, die bislang noch nicht für den robotergestützten Einsatz verfügbar sind, so weiterzuentwickeln und anzupassen, dass sie von den Einsatzkräften in der Praxis genutzt werden können. Am Ende des Projekts soll ein Technologiedemonstrator stehen, der den Vorteil der neuen zusätzlichen Sensorik in der Praxis darstellen kann.
Ethische, rechtliche und arbeitswissenschaftliche Betrachtungen
Dieser technologiezentrierte Forschungsanteil steht gleichberechtigt neben der Einbindung der Menschen, die später tatsächlich mit dem System arbeiten. Ziel ist die optimale Gestaltung der Bedienung und Darstellung der Informationen. Ein weiterer, ebenso wichtiger Punkt ist die Betrachtung der rechtlichen und ethischen Implikationen des Gesamtsystems und seiner Komponenten. Damit wird sichergestellt, dass das System unter gesellschaftlichen Aspekten (zum Beispiel die Akzeptanz bei den Anwendern, Darstellung) wie auch rechtlichen Gesichtspunkten (zum Beispiel die Verwertbarkeit der gewonnenen Informationen als Beweismittel vor Gericht) zuverlässig einsetzbar ist.
Durch das Einbeziehen der späteren Benutzer des Systems gleich zu Anfang des Projekts wurde sichergestellt, dass die Handhabung und Bedienung der komplexen Sensorsysteme und insbesondere die Darstellung der gewonnenen Informationen praxistauglich ist und die Anforderungen der Benutzer erfüllt. Dies schließt nicht nur die effektive und effiziente Visualisierung der Messdaten mit ein, sondern auch die Bedienung der Sensorsysteme (zum Beispiel das Auslösen eines bildgebenden Systems und die Einstellung der dafür relevanten Messparameter) sowie die Dokumentation des Einsatzes und das Abspeichern der Ergebnisse.
Diese Basis für die menschzentrierte Gestaltung des Interfaces wurde vom Institut für Arbeitswissenschaft (IAW) der RWTH Aachen University übernommen, welches das Projekt mit der iterativen Gestaltung und Evaluierung der benutzerfreundlichen Mensch-Maschine-Schnittstelle unterstützt. Besonders in der Anfangsphase des Projekts wurden hierfür zahlreiche Interviews mit Experten und Anwendern geführt (BPOL, LKA BW, BKA), um die Oberfläche der zentralen Mensch-Maschine-Schnittstelle entsprechend den Anforderungen der Anwender zu entwickeln. Bei der Dialoggestaltung standen zur Förderung einer klaren Strukturierung und einfachen Bedienbarkeit Aspekte wie Aufgabenangemessenheit, Erwartungskonformität und Steuerbarkeit im Fokus.
Hieran schließt die rechtliche Betrachtung an, denn der polizeiliche Einsatz des robotergestützten Sensoriksystems kann mit Grundrechtseingriffen verbunden sein. Hierbei steht das Recht auf informationelle Selbstbestimmung im Vordergrund, denn jede Erhebung und Verarbeitung personenbezogener Daten stellt einen Grundrechtseingriff dar, der eine entsprechende Befugnisnorm verlangt. Aus Nutzersicht ist durch die rechtlichen Betrachtungen sicherzustellen, dass der Einsatz rechtskonform möglich ist und die dadurch erzielten Ergebnisse für die Strafverfolgung verwendet werden können.
Diese rechtlichen Voraussetzungen für den Einsatz des robotergestützten Sensoriksystems werden durch das Forschungsinstitut für öffentliche und private Sicherheit (FÖPS Berlin) der Hochschule für Wirtschaft und Recht Berlin (HWR Berlin) untersucht. Hierbei werden die Gefahrenabwehr sowie eine Verwertbarkeit der erhobenen Daten als Beweise in einem Strafverfahren sowie zu Ausbildungs- und Schulungszwecken betrachtet. Ziel der rechtlichen Betrachtung ist verfassungskonforme Technikgestaltung insbesondere durch privacy by design sowie Rechtssicherheit für die Einsatzkräfte bei der Nutzung der neuen Technologie.
Auf österreichischer Seite betrachten die Firma IQSoft gemeinsam mit dem Forschungsinstitut Vienna Center for Societal Security (VICESSE) und der Johannes-Keppler-Universität (JKU) aus Wien die Aspekte der Datenübertragung, -speicherung und -verschlüsselung. Sie beantworten im Projekt die Frage, wie die Notwendigkeit der Sicherstellung der Integrität der gewonnenen Daten technologisch umgesetzt werden kann, so dass bereits auf dem Übertragungsweg vom Roboter zur Basisstation eine Manipulation von Messergebnissen ausgeschlossen ist. Das geht bis hin zur Betrachtung der Frage, wie man diese durchaus sensitiven Informationen so speichern kann, dass sie auch gegenüber einem „Leaken“ an die Öffentlichkeit geschützt sind.
Das betrifft sowohl die Speicherung direkt während des Einsatzes als auch den Schutz der Daten nach der Archivierung – denn es wäre ein großes Sicherheitsrisiko, wenn so eine Datenbank mit Beispielen für „gute“ oder „schlechte“ Bomben ins Internet gelangte. Hier wurde ein Lösungskonzept entwickelt, das auf Peer-to-Peer-Verschlüsselung und einem Hardware-Key für die Datenbank in Form eines USB-Dongles basiert. Damit ist sichergestellt, dass nur die Entschärfer selbst auf die Datenbank zugreifen können und kontrollieren können, welche Informationen weitergegeben werden und ob sie – je nach Zweck der Weitergabe – gegebenenfalls noch anonymisiert werden müssen.

Technologische Forschung: Sensorsysteme und Datenverarbeitung
Zunächst müssen jedoch diese Daten gewonnen werden. Dies möglich zu machen ist die Aufgabe der Technologiepartner in DURCHBLICK.
Die im Projekt betrachteten Sensortechnologien lassen sich grob in bildgebende und in analytische Verfahren aufschlüsseln. Letztere sind chemische oder physikalische Analysemethoden, die Informationen über chemische Verbindungen liefern können und damit wertvolle Hinweise auf das Vorhandensein von Sprengstoffen oder Radioaktivität geben. Diese Aspekte werden von den österreichischen Firmen CBRN Protection GmbH und IONICON bearbeitet. Weil nicht nur die Tatsache, dass Stoffe vorhanden sind, sondern auch die Frage, um welche Stoffe es sich konkret handelt, von besonderem Interesse ist, wird hier die Miniaturisierung der neuartigen Technologie „Protonentauschreaktion-Time-of-Flight-Massenspektrometrie“ (PTR-TOFMS) vorangetrieben.
Zwar ist das neue, im Projekt entwickelte Gerät für die Mitführung auf der kleinen „telemax“ - Roboterplattform noch zu schwer, kann jedoch vom großen Bruder „tEODor“ mitgezogen werden. Das System weist eine hohe Sensitivität und Spezifität auf. So können berührungslos aus geringer Entfernung auch kleinste Spuren von Spreng- oder Kampfstoffen nachgewiesen und identifiziert werden. Damit können nicht nur Hinweise auf das mögliche Vorhandensein einer USBV im verdächtigen Gegenstand gewonnen werden, sondern auch wertvolle Informationen darüber, aus welchen Komponenten und Stoffen die Vorrichtung besteht und wie gefährlich sie ist.

Lage, auf eine Entfernung von mehreren Metern auch schwache
radioaktive Strahlung zu detektieren und ortsaufgelöst darzustellen.
Ein Hybrid hinsichtlich der Aufteilung in analytische oder bildgebende Technologie stellt hier die Gammakamera dar, die durch das Freiburger Materialforschungszentrums (FMF) ins Projekt eingebracht wird.
Diese Kamera wurde ursprünglich für den Einsatz in Atomkraftwerken zur Suche nach Strahlungslecks entwickelt. Sie kann radioaktive Quellen auch aus der Entfernung detektieren und räumlich verorten. Durch die Überlagerung mit einem Farbbild des Objekts aus der Robotersicht kann der Entschärfer genau lokalisieren, wo sich eine radioaktive Quelle befindet. Das ist wichtig, um beim Einsatz von Entschärfungsmitteln, wie zum Beispiel einem Wasserstrahlgewehr, sicherzustellen, dass Behältnisse mit radioaktivem Material nicht beschädigt werden und somit die Umgebung nicht kontaminiert wird. In DURCHBLICK wird die Leistungsfähigkeit der Gammakamera durch einen neuen Detektorchip gesteigert und die Auswertung der Signale so verbessert, sodass Strahlung nicht nur detektiert, sondern auch durch spektroskopische Messung eine automatische Identifizierung der Strahlenquelle binnen weniger Minuten und damit ebenfalls eine genauere Beurteilung der Gefahr möglich wird.
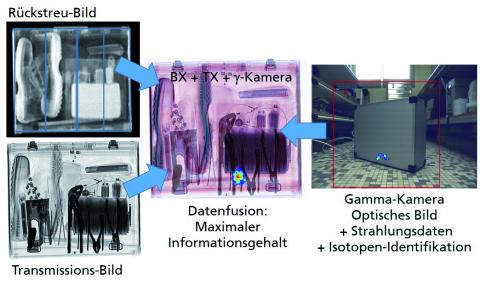
Auch die Weiterentwicklung der Röntgenbildgebung, welche eine der wichtigsten und meist zuerst eingesetzten Methoden bei der Untersuchung verdächtiger Objekte ist, ist ein Kernelement von DURCHBLICK. Hier nehmen die Nutzbarmachung der Röntgenrückstreutechnologie durch die Firma D-TeC und das Fraunhofer EMI eine zentrale Rolle ein. Die Methode der Röntgenrückstreuung benötigt im Gegensatz zu konventioneller Transmissionsbildgebung keinen Detektor hinter dem Objekt, sondern erzeugt aus der vom Gegenstand zurückgestreuten Röntgenstrahlung ein Bild. Dabei befinden sich Röntgenquelle und Detektor in einem Gerät. Die Markteinführung von Röntgenrückstreugeräten, die klein und leicht genug sind, um auf eine Roboterplattform integriert zu werden, war einer der Gründe, das Projekt DURCHBLICK zu initiieren.
Eine weitere wichtige Randbedingung der Entschärfer ist es, dass mit dem mitgeführten Röntgengerät weiterhin auch konventionelle Röntgenbildgebung möglich sein muss, um während des Einsatzes eine Rückkehr zum Einsatzleitstand zum „Umbau“ des Roboters zu vermeiden. Deshalb sind die Untersuchung der Machbarkeit und die Realisierung eines Demonstrators eines Röntgensystems, das sowohl die Aufnahme konventioneller Transmissionsbilder als auch gleichzeitig die der neuartigen Röntgenrückstreubilder ermöglicht, weitere Ziele von DURCHBLICK. Die bisherigen Ergebnisse lassen den Schluss zu, dass auch mit einem Rückstreugerät als Röntgenquelle die Erzeugung passabler Transmissionsaufnahmen möglich ist – was zu Beginn des Projekts noch völlig offen war. Diese positive Erkenntnis sowie die Tatsache, dass anhand von Beispielen gezeigt werden konnte, dass man auch durch die Rückstreutechnologie selbst in der Lage ist, Bedrohungen zu finden und zu identifizieren, sind Kernergebnisse des Projekts.
Sind all diese Bilder und Messdaten erfasst, so müssen sie entsprechend aufbereitet und miteinander in Beziehung gesetzt werden, wie bei einem komplexen mehrdimensionalen Puzzle. Ziel ist es, ein übersichtliches Gesamtbild der Situation zu erzeugen, welches erkenntnisbringend und klar dargestellt werden kann und dem Anwender eine möglichst gute Einschätzung der Lage erlaubt. Dieser Aspekt der Datenfusion wird vom Fraunhofer EMI und dem AIT Austrian Institute of Technology gemeinsam bearbeitet. Dafür sind auch weitere Informationen notwendig, wie etwa der genaue Zeitpunkt und der Ort relativ zum Objekt im 3D-Raum, an dem die Bilder oder Messdaten erfasst wurden.
Dabei spielt die präzise Erfassung von 3D-Informationen über die lokale Umgebung eine große Rolle, um die sich die Firma STANCON im Projekt kümmert. Eine benutzerfreundliche Darstellung des Gesamtbilds, die für Einsatzkräfte auch in Stressituationen übersichtlich bleibt und leicht zu bedienen ist, erstellen IQSOFT und die RWTH Aachen. Auf deutscher Seite wird in Zusammenarbeit mit der Firma Telerob auf das sogenannte Autonomiemodul zurückgegriffen, das ähnliche Informationen liefert und für das Demo-System „telemax“ verfügbar ist. Das Gesamtsystem wird somit – unabhängig von der Marke der Trägerplattform – einsetzbar sein.
Als zwingende Voraussetzung für eine gelungene Datenfusion müssen natürlich nicht nur diese Daten und Metadaten erfasst werden, sondern auch die Geräte auf dem Roboter montiert werden und die Stromversorgung, Datenanbindung und Kommunikation der Komponenten untereinander sichergestellt sein. Diese Aspekte bearbeitet die Firma progenoX.
Der Reality-Check für die Forschungsergebnisse
Um die Effektivität und die Fähigkeiten des entwickelten Gesamtsystems zu quantifizieren, begann DURCHBLICK mit einer Erfassung der Bedrohungslage. Hierzu wurden in gemeinsamen Workshops mit Entschärfern tatsächlich im Feld aufgetretene, aber auch in Zukunft mögliche Bedrohungen charakterisiert und daraus konkrete Szenarien abgeleitet, von denen mehrere für das Projekt als Nachbau realisiert wurden. Immer wieder wurden und werden diese Demo-Objekte im Projekt verwendet, um alle Aspekte und Technologien anwendungsnah zu testen und im Konsortium zu diskutieren.
Die Wahl der untersuchten Sensortechnologien ist ebenfalls nicht zufällig – diese und auch andere Methoden wurden im Kontext der in DURCHBLICK betrachteten Szenarien analysiert und hinsichtlich verschiedener Kriterien (etwa der Eignung für die Erkennung der Bedrohung und die Integrierbarkeit auf den Roboter) bewertet. Es wurde sichergestellt, dass die in DURCHBLICK untersuchten Sensormethoden für die Erkennung der relevanten Gefahren geeignet sind und sich optimal ergänzen, um eine maximale Bandbreite an potenziellen Bedrohungen abzudecken.
Fazit
Die bisher gewonnenen Ergebnisse und auch die Darstellung derselben wurden von den Einsatzkräften sehr positiv beurteilt. Bereits während der Projektlaufzeit hat DURCHBLICK auch die Aufmerksamkeit von Behörden und der Öffentlichkeit auf sich gezogen. DURCHBLICK leistet einen Beitrag zur sicheren, effektiven und rechtsstaatlichen Gefahrenabwehr und Strafverfolgung. Nach Projektende soll der Demonstrator als Basis für eine Produktentwicklung genutzt werden, sodass die Hard- und Software den Einsatzkräften in Form von Zusatzausrüstung, mit der bestehende Robotersysteme aufgewertet werden können, zur Verfügung stehen können.
Damit soll in Zukunft die Sicherheit für Einsatzkräfte und Unbeteiligte erhöht werden, und es sollen mehr und detailliertere Informationen zur Verfügung stehen, um Terroristen und Kriminelle vor Gericht zu überführen. Damit einhergehend soll auch die Zeit, in der ein Bahnhof oder Flughafen gesperrt werden muss, reduziert werden – wovon nicht nur Behörden, sondern auch jeder Einzelne in Deutschland und Österreich profitiert.
Weitere Informationen zu DURCHBLICK unter www.durchblick-projekt.de und http://durchblick.sifo.de
¹ DURCHBLICK steht für „Detektion unterschiedlicher unkonventioneller Spreng- und Brandvorrichtungen mittels intelligenter analytischer Sensorik“
² Unkonventionelle Spreng- und Brandvorrichtungen
Crisis Prevention 1/19
Dr. Stefan Moser
Fraunhofer-Institut für Kurzzeitdynamik
Ernst-Mach-Institut, EMI
Gruppenleiter Röntgenanalyse und Bildverarbeitung
Abteilung Messtechnologie und Sensorik
Am Klingelberg 1
79588 Efringen-Kirchen
Tel.: +49 (0) 7628 9050 - 635
stefan.moser@emi.fraunhofer.de
Dipl.-Ing. Michael Hofstätter (AIT)
Thematic Coordinator
Competence Unit Sensing and Vision Solutions Center for Digital Safety & Security
Austrian Institute of Technology Gmb
Giefinggasse 4
1210 Wien, Austria
T +43 664 2351858
Michael.Hofstaetter@ait.ac.at
www.ait.ac.at











