In immer mehr Anwendungsfeldern begegnen uns heute Miniaturdrohnen der Mittelklasse, die bezahlbar und flexibel sind und eine Menge können. Sie sind leicht zu fliegen, haben eine inzwischen enorme Zuladungen, hohe Reichweiten, Betriebsdauern und Geschwindigkeiten. Und das alles bei niedrigen Kosten und wenig Vorbereitungsaufwand. Die Kehrseite ist der Missbrauch und die enormen Möglichkeiten für lästige und kriminelle Aktivitäten.
Die Chancen von Gegenmaßnahmen sind begrenzt. Umso wichtiger ist es, die Gefahr frühzeitig zu erkennen und einzuschätzen, damit aus der Vielzahl der möglichen Aktionen, die ausgewählt werden, die am ehesten wirken, die legal sind und die möglichst keine Gefahren für Unbeteiligte mit sich bringen. Im Projekt ArGUS1 wird an einem Assistenzsystem gearbeitet, das eine multisensorische Detektion zu einem möglichst frühen Zeitpunkt, eine Klassifikation und eine Situationsanalyse sowie einer Abschätzung möglicher Konsequenzen realisiert.
Damit soll den Einsatzkräften eine Entscheidungsunterstützung an die Hand gegeben werden, mit der in kurzer Zeit zu einer optimalen Lösung der Situation gelangt werden kann.

Ausgangssituation
Immer mehr zivile Drohnen sind für viel gute Zwecke im Einsatz. Sie inspizieren Gebäude nach einer Schädigung (z. B. Nôtre Dame), helfen in der Land- und Forstwirtschaft und sind für Filmaufnahmen nicht mehr wegzudenken. Auch für Sicherungsaufgaben werden sie bereits erfolgreich eingesetzt, Safety- und Security-Anwendungen werden gleichermaßen von den nützlichen Helfern unterstützt. Leider hat es nicht lange gedauert, bis man auf die Idee kam, dass auch weniger nützliche Aktionen mit Hilfe von Drohnen leicht und ohne Risiko durchgeführt werden können.
Ein bisschen vergleichbar mit Cybercrime und immer nach dem Motto “the bravery of being out of range“ 2 dienen sie zur Durchführung leicht ausführbarer aber schwer detektierbarer bzw. aufklärbarer Straftaten. Hierzu zählen harmlose Aktionen von Papparazzi und solchen die es werden wollen, über bereits ernsthaften Schmuggel von Waren und Gegenständen über bis dahin unüberwindbare Barrieren wie Gefängnismauern, Grenzen oder Geländeeinfriedungen bei Industrieanlagen, bis hin zu schweren Straftaten, die bestimmte Personengruppen bei bestimmten Anlässen bedrohen. Wer kennt nicht die Wahlkampfszene aus Dresden aus dem Jahre 2013, glücklicherweise war es hier nur ein Scherz der Piratenpartei, ein ernsthafter Angriff wäre aber genauso wenig abgewehrt worden.
Zielsetzung
Um Gefahren zu begegnen, die von ungewollten Drohnen ausgehen, benötigt man drei Komponenten, eine zuverlässige Detektion und Klassifikation, eine zutreffende Analyse der Bedrohungslage und daraus resultierend die optimale Wahl der Wirkmittel und deren Einsatz für die Gegenmaßnahmen, und das alles in wenigen Sekunden unter Beibehaltung der rechtlichen Rahmenbedingungen, dem Datenschutz und der geforderten Verhältnismäßigkeit. Insgesamt ergeben sich durch diesen Anspruch extrem hohe und schwer umsetzbare Ziele für ein solches System.
Technologischer Ansatz
Da es keinen Drohnensensor von der Stange gibt wie das bei Temperatur- und Drucksensoren der Fall ist, muss man die zur Verfügung stehende Sensortechnologie entsprechend zum Einsatz bringen und per Software eine Analyse zur Detektion und Klassifikation von Drohnen durchführen. Mit Hilfe immer ausgefeilterer mathematischer Modelle gelingt es auf diese Weise, aus den Primärdaten von der optischen, akustischen, radarbasierten und Hochfrequenzbasierten Sensorik ein zuverlässiges Detektionsergebnis abzuleiten, das darüber hinaus sogar eine Klassifikation der Drohnentypen erlaubt.
Mittels ausgefeilter Modellierung typischer Szenen und assoziierten Gefährdungsszenarios gelingt es auch, eine Vorauswahl von Bedrohungssituation zu modellieren und zu parametrieren, die es den Einsatzkräften ermöglichen, zu einem frühen Zeitpunkt eine simulationsbedingte Prädiktion durchzuführen und in Frage kommende Maßnahmen zu vergleichen.
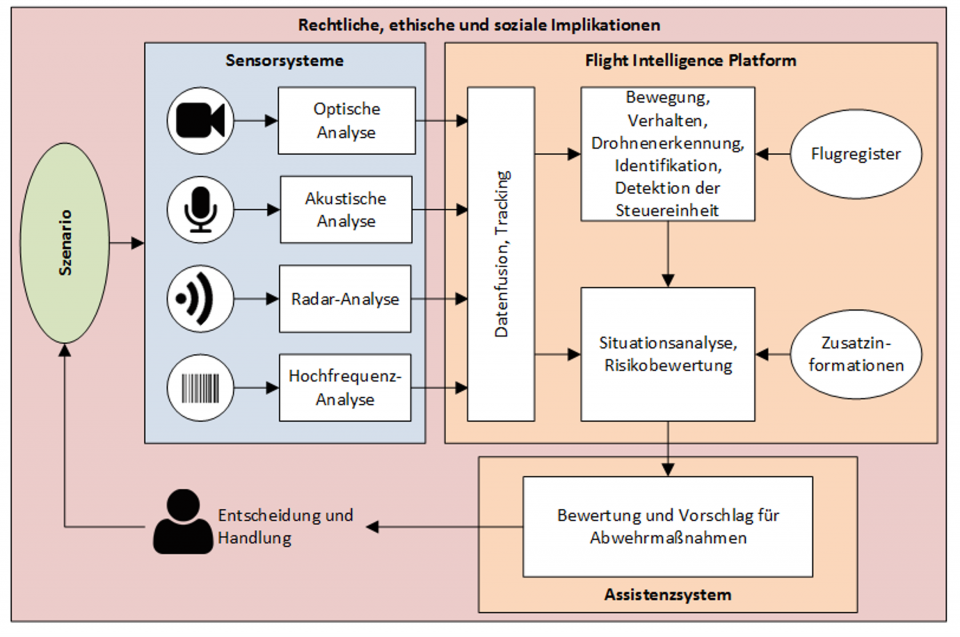
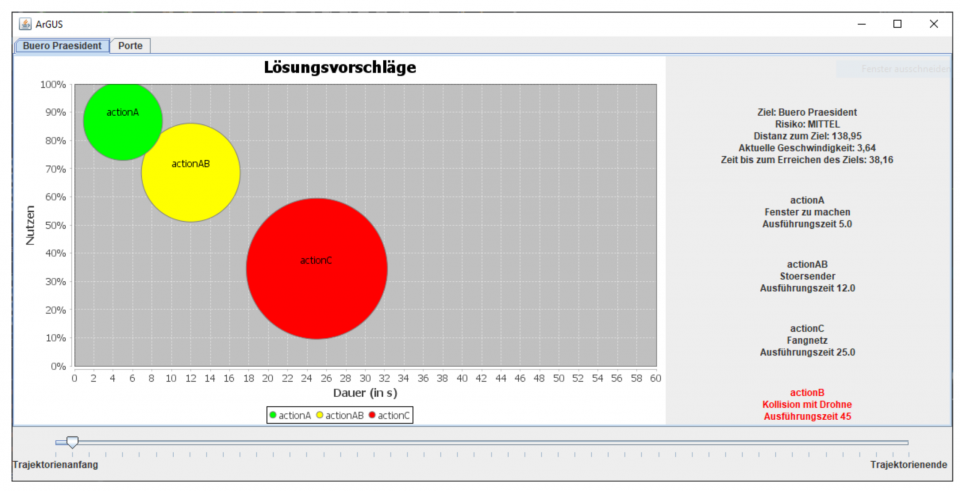
Neben den Erfolgsaussichten der Maßnahmen müssen auch die mögliche Gefährdung Unbeteiligter, die rechtlichen Voraussetzungen und die entstehenden Kosten berücksichtigt werden. Diese komplexe Situation macht den Einsatz vollautomatischer Systeme unverantwortlich und unmöglich. Das System leistet als Assistenzsystem interaktive Entscheidungsunterstützung für die Anwender und erleichtert damit die rasche und zielgerichtete Auswahl, der am besten geeigneten Gegenmaßnahmen.
Nach einem szenenangepassten Training und dem interaktiven Durchspielen realistischer Szenarien wird im Einsatz nur eine schematische Ergebnisübersicht mit auszuwählenden Maßnahmenkombinationen visualisiert. Was die Einsatzkräfte an dieser Stelle auswählen, müssen sie vorher im Detail gelernt und verinnerlicht haben, nur so kann ein solches System funktionieren, dass in wenigen Sekunden für ein belastbares Ergebnis sorgen muss.
Ausblick
Das im Projekt ArGUS konzipierte Detektions- und Analysesystem ist in einer exemplarischen Implementierung realisiert und wird in entsprechenden Folgevorhaben zu einer modularen Produktfamilie entwickelt, die anforderungsorientiert in den entsprechenden Anwendungen stationär oder mobil zum Einsatz gebracht werden kann. Cloudlösungen helfen bei der situationsangepassten Installation und temporären Skalierung. Auf diese Weise wird bald ein kostengünstiges System für eine Vielzahl von Anwendungen verfügbar sein.
1 https://www.sifo.de/files/Projektumriss_ArGUS.pdf
2 https://www.antiwarsongs.org/canzone.php?id=784&lang=en
4 https://www.drohnen-journal.de/mit-argusaugen-foerderprojekt-gegen-bedrohung-durch-drohnen-1052
Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung
Interaktive Analyse und Diagnose
Fraunhoferstraße 1, 76131 Karlsruhe, Germany
Dr. Gunther P. Grasemann












