Ausgangslage und Problemstellung
Die Verwendung ziviler Drohnen zu Transportzwecken rückt immer stärker in die Realität. Insbesondere im medizinischen Bereich gibt es eine wachsende Zahl an vielversprechenden Anwendungsfällen, so zum Beispiel der Transport von Medikamenten, Organen oder Blutkonserven. Allerdings sind die organisatorischen Regularien im dafür prädestinierten, bisher unkontrollierten, unteren Luftraum im Gegensatz zum konventionellen Luftverkehr (vgl. Air Traffic Management, ATM) bis dato nicht etabliert – sie befinden sich noch in der Entstehungsphase (vgl. Unmanned Aerial Traffic Management, UTM). Daher ist es umso wichtiger, schon heute irreguläre Systemzustände in Verkehrssituationen zu detektieren, zu klassifizieren und möglichst schnell durch geeignete Gegenmaßnahmen zu beheben. Insbesondere Flugstrecken im urbanen Gebiet bergen Risiken der ungewollten Interaktion mit anderen Objekten – diese könnten durch geeignete Maßnahmen bei der Vorbereitung und Durchführung von Flügen vermieden werden.
Aktuell wird hierzu im BMDV-Projekt SIMULU (Sicherheit im unbemannten Luftverkehr) unter Leitung des Fraunhofer IOSB die Überwachung und Sicherung des unbemannten Transportverkehrs erforscht. Neben der multisensoriellen Detektion und Klassifikation der Flugobjekte geht es dabei um die Situationserkennung und die Verifikation der im Flugregister angemeldeten Flüge, sowie mögliche Abweichungen davon. Darüber hinaus wird die Prognose der Wirkung möglicher Gegenmaßnahmen sowie die Assistenz bei der Entscheidungsfindung im Hinblick auf die Wiederherstellung des Normalbetriebs betrachtet. Zur Verdeutlichung sei ein regulärer Flugbetrieb (vgl. Abb. 1) geben. Dieser weist „grüne“ Flugobjekte auf, die sich in allen Belangen an die Vorgaben halten (hier: Flugkorridor). Unerwünscht sind „rote“ oder „gelbe“ Flugobjekte, die in entscheidenden Punkten von den Vorgaben abweichen oder aber im Begriff sind, dies zu tun. Sobald ein “gelbes” Flugobjekt detektiert wird, werden die ersten Maßnahmen situationsbezogen vorausgeplant. Im Falle einer Klassifikation als “rotes” Flugobjekt können diese Maßnahmen dann zeitnah, im Sinne einer Entscheidungsunterstützung, eingeleitet oder weiter angepasst werden.
In der Regel handelt es sich bei den angemeldeten Missionen solcher Drohnen um Transportflüge von A nach B. Diese erfolgen typischerweise über eine vorher festgelegte Flugroute, auf der eine Reihe von Gefahren im Sinne von Safety und Security lauern können. Das sind beispielsweise Wettereinflüsse, statische und dynamische Hindernisse, aber auch Störer und Angreifer, die aus unterschiedlichen Beweggründen den Transport unterbinden wollen (s. Abb. 2).
Entscheidungsunterstützung
bei der Flugplanung
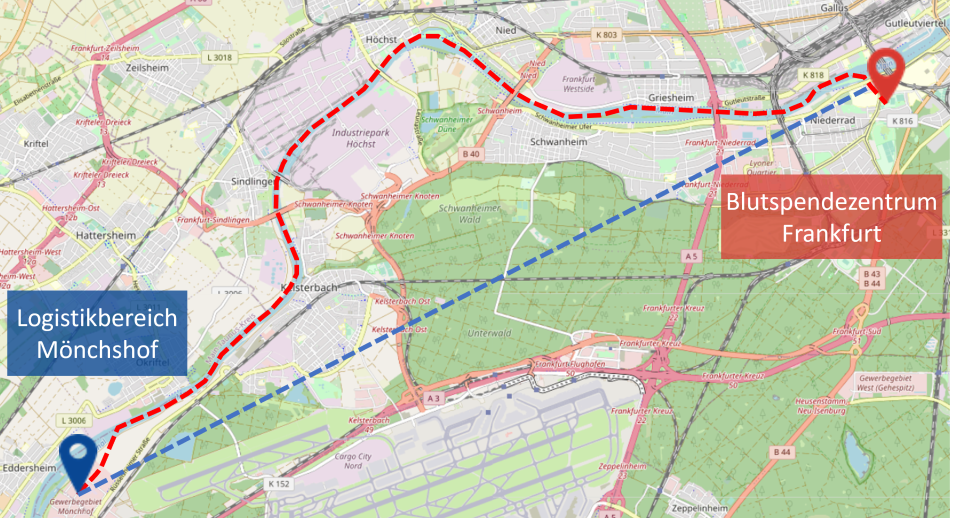
Unser Beispiel zeigt den Transport einer Blutkonserve von einem Logistikbereich des Flughafens Frankfurt am Main zum nahe gelegenen DRK Blutspendezentrum (Abb. 3). Dieser Transport soll regelmäßig per Drohne durchgeführt werden, weshalb ein großes Interesse an der Kenntnis möglicher Gefahren für den Flug besteht. Als Flugstrecke wurden vom Betreiber Wegpunkte entlang des Mains vorgegeben, wodurch nahezu der gesamte Flug über Wasser stattfindet.
Grundsätzlich ist ein Flug über Wasser sehr sicher, weil sich dort nur wenige statische Hindernisse, wie Brücken oder Hochspannungsleitungen, befinden. Statische Hindernisse stellen zwar durchaus eine Gefahr für den Transport dar, können aber durch geeignete Planung z.B. des Höhenprofils weitestgehend entschärft werden.
Flughafen zur Uniklinik
Weitaus größeres Gefahrenpotential haben dynamische Hindernisse, weil deren Position, Lage und Verhalten nur bedingt vorhersehbar ist. So können beispielsweise bewegliche Baukräne, andere Luftfahrzeuge oder Vogelschwärme schnell zu einer Gefahr für die Drohne werden. Auch Umwelteinflüsse oder interne Defekte bieten Gefährdungspotential für das Flugvorhaben. Die Drohne ist nicht nur verschiedenen Wetterbedingungen ausgesetzt, auch Ablenkungen aus der Flugbahn durch Windeinflüsse oder Komponentenausfälle gefährden die Drohne und erzeugen Anomalien. Wird die Drohne beispielsweise durch einen starken Windstoß aus der vorgesehenen Flugbahn abgelenkt, können auch bereits betrachtete statische Hindernisse wieder zu einer ernstzunehmenden Gefahr für den Transport werden. Neben den genannten Einflüssen können Gefahren zudem aktiv durch Dritte, beispielsweise einen Störer oder Angreifer, herbeigeführt werden. Hierzu zählen unter anderem Störsender, Abfangdrohnen, Abfangnetze oder der Beschuss mit einem Projektil.
Diese Art der Gefährdung kann großen Schaden an der Drohne verursachen und nicht nur zu einer Abweichung vom Normalbetrieb führen, sondern auch den kompletten Verlust von Drohne und Fracht bedeuten.
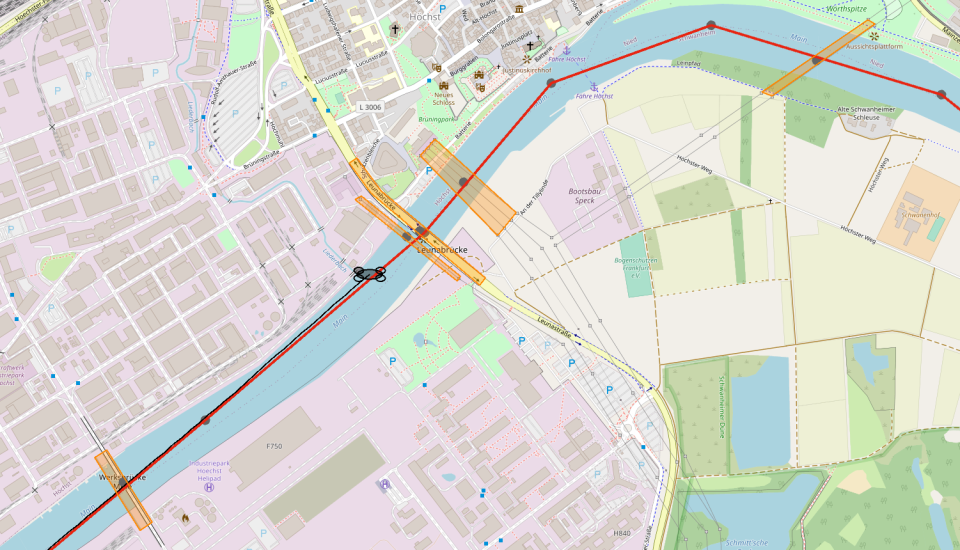
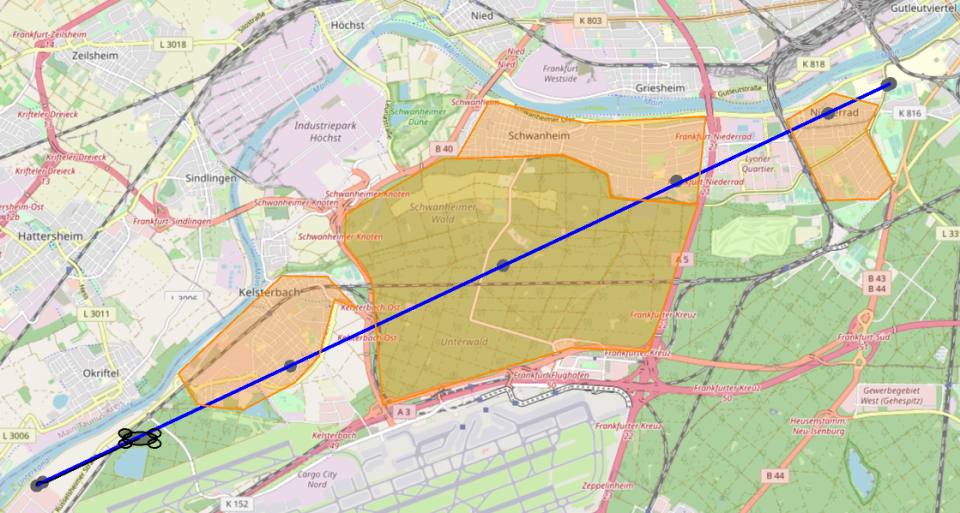
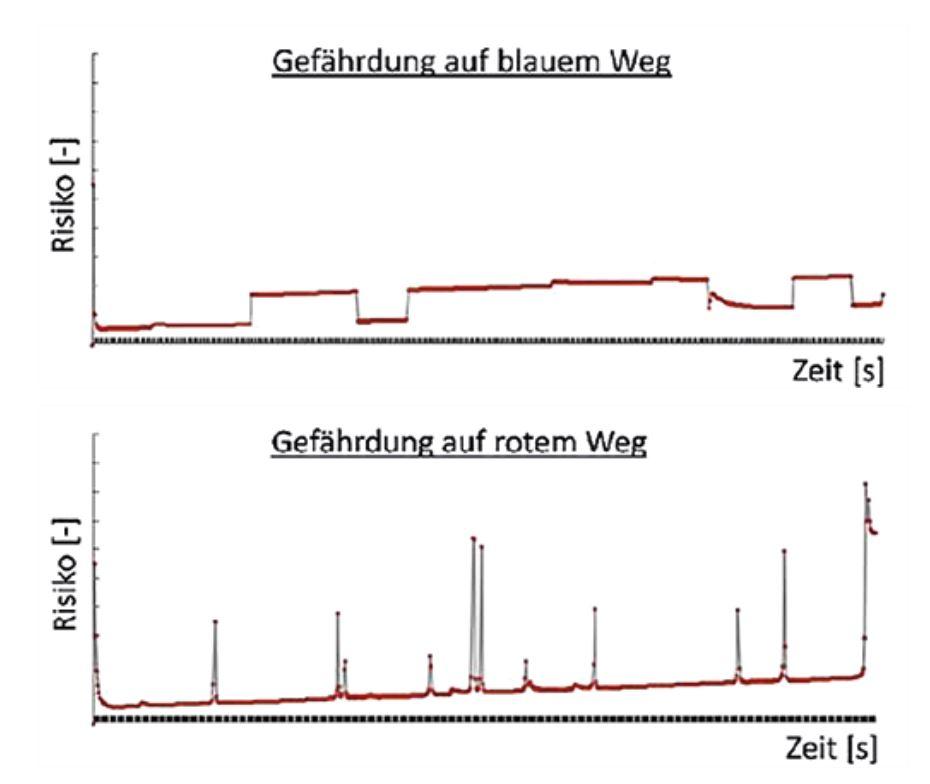
Der vorgegebene Weg entlang des Main (rot) ist grundsätzlich sehr sicher, bietet aber mehrere punktuelle Gefahren, die sich hauptsächlich durch Flussüberquerungen ergeben (Abb. 4). Als Alternative kann der Flug per Luftlinie betrachtet werden (blau). Eine geringere Flugzeit bietet Gefahren weniger Angriffsmöglichkeiten, jedoch führt dieser Flugweg über Wohngebiete, Waldgebiete und Industrieflächen, wodurch sich die Drohne länger in Gebieten indirekter Gefahren aufhält, die durch Beschränkungen oder mögliche rechtliche Folgen aus einem Überflug entstehen können (Abb. 5). Auf beiden Wegen befinden sich also unterschiedliche Gefahren, die jeweils verschiedene Herausforderungen für das Flugvorhaben mit sich bringen.
Nach der Betrachtung von möglichen Gefahren ist es notwendig, ausgehend von den gesammelten Erkenntnissen die Routenplanung gegebenenfalls zu überarbeiten oder geeignete Maßnahmen gegen die Gefahren zu treffen. Eine geeignete Abwägung von Gefahren und Sicherheiten, auch im Hinblick auf Kosten und Effizienz, ist deshalb der wichtigste Bestandteil bei der Betrachtung dieses Szenarios. Mithilfe von Simulationen sowie Prognosen wird diese Entscheidungsfindung durch die Gefahrenabschätzung unterstützt. Dabei wird der Flugweg iterativ angepasst und der Einfluss der betrachteten Gefahren minimiert.
Entscheidungsunterstützung
bei der Flugdurchführung
Obwohl der Einfluss bekannter Gefahren durch die zuvor optimierte Wegstrecke weitestgehend minimiert wurde, können während des Fluges dennoch unvorhergesehene Gefahren auftreten. Während der Flugdurchführung ist die Drohne deshalb durchgehend mit einem übergeordneten Management- oder Geo-Awareness-System verbunden. Dieses System enthält Möglichkeiten zur Gefahrendetektion, um während des Fluges Gefahren zu erkennen und bestenfalls auch zu klassifizieren.
Werden während des Fluges Gefahrensituationen erkannt, muss entsprechend darauf reagiert werden. Die Entscheidung, welche Reaktion in der entstandenen Situation die besten Aussichten auf Erfolg hat, ist in der kurzen zur Verfügung stehenden Zeit oft nur schwer zu treffen. Deshalb ist es notwendig mithilfe von Modellen mögliche Reaktionen zu simulieren und anhand von Analysen eine Entscheidungsunterstützung in Form einer Reaktionsunterstützung zu geben. Dadurch können plötzliche oder unbekannte Gefahren bestmöglich abgeschwächt oder sogar abgewendet werden.
Bei dem oben betrachtete Beispielszenario eines Bluttransports kann beispielsweise ein Rettungshubschrauber, der sich auf dem Weg zu einem unvorhergesehenen Einsatz befindet, eine plötzlich auftretende Gefahr für die Drohne darstellen. Sobald die Gefahr vom übergeordneten Managementsystem der Drohne erkannt wird, kann die Berechnung verschiedener Reaktionsszenarien gestartet werden. Mögliche Reaktionen in diesem Szenario sind unteranderem ausweichen, beschleunigen, verzögern oder zwischenlanden. Durch die hinterlegten Modelle können die Verhaltensweisen von Drohne und Hubschrauber simuliert und entsprechende Wechselwirkungen analysiert werden. Basierend auf vorgegebenen Faktoren kann die Analyse eine Bewertung der verschiedenen Reaktionsmöglichkeiten vornehmen und somit eine Entscheidungsunterstützung bieten.
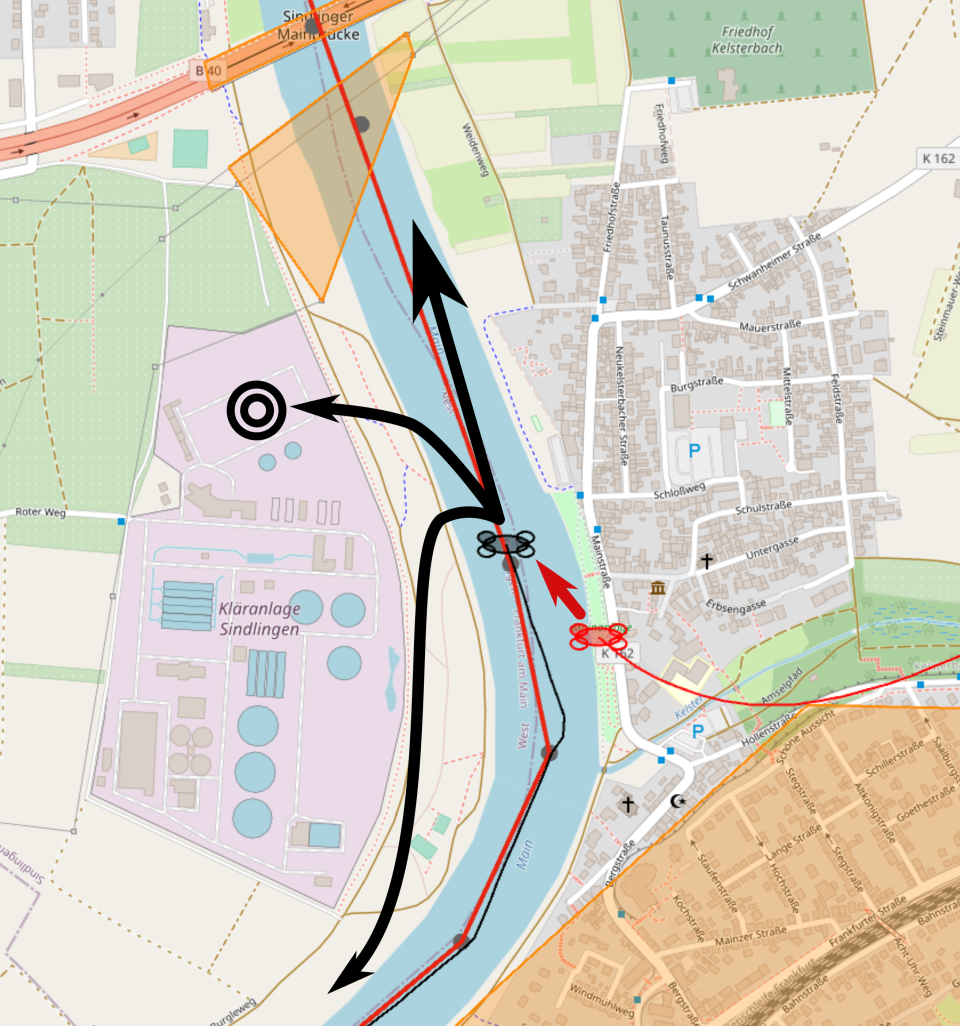
Auch bei Szenarien, die aktive Gefahren für das Flugvorhaben darstellen, wie beispielsweise einer Abfangdrohne, kann durch Simulationen und Prognosen eine Entscheidungsunterstützung erzeugt werden. Das Vorgehen ist dabei ähnlich wie im Beispiel des Rettungshubschraubers. Sobald die angreifende Drohne als Gefahr für den Bluttransport erkannt wird, können mögliche Reaktionen automatisch untersucht und entsprechende Erfolgschancen ermittelt werden. So ist es möglicherweise ratsam, die Geschwindigkeit der eigenen Drohne zu erhöhen, um dem Einflussbereich der Abfangdrohne entgehen zu können. Alternativ kann auch über eine Rückkehr zum Startpunkt der Mission nachgedacht werden, damit die Drohne dort zunächst sicher verwahrt werden kann. Auch eine sofortige Notlandung kann in Betracht gezogen werden, um Schäden an der Fracht durch den Beschuss oder den Absturz der Drohne zu vermeiden (siehe Abb. 6). Durch die Simulation und Analyse der verschiedenen Reaktionsmöglichkeiten kann unter Berücksichtigung der hinterlegten Verhaltensmodelle die Reaktion mit dem geringsten Risiko bzw. der größten Erfolgsaussicht ermittelt werden. Das Ergebnis kann dem Anwender in Echtzeit unterbreitet werden, damit dieser mit der Einleitung der entsprechenden Maßnahmen frühzeitig beginnen kann. Die Entscheidung, welche Reaktion tatsächlich umgesetzt wird, liegt weiterhin beim Anwender. Durch die Simulationen und Analysen sollen lediglich alle verfügbaren Informationen zeitnah aufbereitet und dargestellt werden, um die Entscheidungsfindung während der Flugdurchführung bestmöglich zu unterstützen.
Simulation als Grundlage für Entscheidungsunterstützungen
Das im Projekt realisierte Programmsystem zur Simulation und Analyse von Szenarien kann ein entstehendes Situationsgeschehen nachbilden und durch entsprechende Modelle fortführend simulieren. Dadurch ergibt sich die Möglichkeit einer Entscheidungsunterstützung sowohl für die Planungsaufgabe als auch für die Reaktionsaufgabe.
Um Gefährdungslagen durch bekannte oder detektierte Gefahren analysieren zu können, werden für den gesamten Flug mögliche Interaktionen und daraus entstehende Wechselwirkungen simuliert. Die Simulation beruht auf Wechselwirkungs- und Verhaltensmodellen, um entstehende Situationen realitätsnah nachbilden zu können. Anschließende Analysen der Ergebnisse werden genutzt, um eine Risikoabschätzung durchzuführen. Jede mögliche Interaktion ist mit dem Risiko R verknüpft, das sich aus der Eintrittswahrscheinlichkeit p und dem zu erwartenden Schaden S ergibt:
R = p ⋅ S
Zusammen mit den individuellen Gewichtungsfaktoren wi für alle analysierten Ereignisse mit einem relevanten (d.h. über einer Schwelle T liegenden) Risiko ergibt sich die zu erwartende Gefährdung G.

Diese Berechnungen werden hinreichend oft durchgeführt und die entstandenen Ergebnisse dem Anwender unterbreitet. Dadurch kann im Falle einer Optimierungsaufgabe die Entscheidungsunterstützung durch das Systems in Form einer Gefahrenabschätzung geboten werden. Im Fall einer Reaktionsaufgabe hat die Entscheidungsunterstützung hingegen die Form einer Reaktionsunterstützung.
Die oben genannte Schwelle T beschreibt die Risikobereitschaft des Anwenders. Zusammen mit den Risikobewertungen Ri und den Gewichtungsfaktoren wi ist sie ein entscheidender Parameter von Simulation und Planung. Auf diese Weise wird die Entscheidungsunterstützung auf verschiedenen Ebenen unterschiedlich gesteuert. Bei einer hohen Risikobereitschaft wird die Schwelle entsprechend hoch gewählt, damit kleinere Risiken nicht berücksichtigt werden. Bezogen auf die gezeigte Optimierungsaufgabe werden dann die Risiken des blauen Wegs nicht als Gefahr gewertet, wohingegen die punktuellen Gefahren des roten Wegs durchaus zu einer Gefahrenbewertung beitragen. Bei niedrigem Schwellwert überwiegt die Summation der Risiken des blauen Wegs, da diese trotz kleinerem Einzelrisiko über deutlich längere Zeit anhalten. Je nach Anwender und Anwendung werden die Risiken womöglich anders bewertet, was durch individuelle Gewichtungsfaktoren zum Ausdruck gebracht werden kann. Bei einer Gefährdungsberechnung wie mit der oben genannten Formel muss allerdings beachtet werden, dass dadurch ein sehr komplexer Sachverhalt auf den Informationsgehalt einer skalaren Zahl komprimiert wird. Es besteht also die Gefahr, dass dadurch Informationen verloren gehen oder unbeachtet bleiben. Der Gesamtzusammenhang muss deshalb immer mitberücksichtigt werden.
Ist der Anwender vom unterbreiteten Ergebnis auf Grund der betrachteten Gefährdungssituationen und der Analyse aus den einzelnen Kalkulationsschritten überzeugt, wird er das Ergebnis übernehmen und in diesem Sinne entscheiden. Anderenfalls wird er die Parametrierung erneut hinterfragen und möglicherweise Änderungen vornehmen. Für die Entscheidungsunterstützung im reaktiven Fall müssen die entsprechenden Parameter bereits vorher stochastisch, heuristisch oder auf Erfahrungen basierend festgelegt werden, um eine schnelle Berechnung zu ermöglichen.
Fazit und Ausblick
Das in SIMULU konzipierte System trifft keine autonomen Entscheidungen. Es gibt auch die Entscheidung nicht vor, sondern leistet vielmehr eine interaktive Unterstützung für den Anwender, indem es Simulationsergebnisse generiert sowie visualisiert, risikobasierte Gefährdungsanalysen berechnet und damit den Vergleich von Alternativen ermöglicht. Die letzte Entscheidung trifft der Anwender selbst, der permanent die Möglichkeit hat, die von ihm festgelegten Gewichtungsfaktoren zu hinterfragen und zu modifizieren.
Drohnentechnologien werden auch in Zukunft intensiv weiterentwickelt und führen zu schnellem Wachstum in Bereichen, in denen Drohnen eingesetzt werden. Um mit den steigenden Anforderungen umgehen zu können, werden einerseits Gesetze angepasst, andererseits wird weiter an technischen Systemen gearbeitet, welche den Drohnenverkehr überwachen und regeln sollen. Dabei wird das Rahmenwerk U-Space für die Integration von Drohnen in das bestehende Luftraummanagement der EU eine immer wichtigere Rolle spielen.
Die Gefahren für den Drohnenverkehr und die damit verbundenen Gefahren für die Umgebung entstehen aber vor allem auch durch Quellen außerhalb des U-Spaces. So z.B. nicht-kooperative Drohnen, welche entweder von Personen eingesetzt werden, welche leicht oder grob fahrlässig handeln oder auch von Kriminellen für Spionage, illegale Transporte oder Anschläge genutzt werden. Vögel und Insektenschwärme können Drohnenflüge auch stören – ob als reines Hindernis oder als Naturschutzobjekte. Ein weiteres Problem für den Drohnenverkehr stellen Ereignisse am Boden dar, wie z. B. Großbrände, Massenveranstaltungen oder Unwetter.
Solche Ereignisse können die Bedingungen für den Drohnenverkehr kurzfristig sowie großräumig ändern und müssen zukünftig in ein Drohnenmanagement eingebunden werden. Ereignisse müssen zudem zeitnah erkannt und verknüpft werden, um darauf basierend mit geeigneten Maßnahmen reagieren zu können (z. B. das Umfliegen eines Gefahrengebiets). Weil für die Entscheidung oft nur wenige Sekunden zur Verfügung stehen, müssen zukünftig solche Ergebnisse in eine maßgeschneiderte Entscheidungsunterstützung eingebettet werden. Im Forschungsprojekt SIMULU werden derzeit die Grundlagen für solcherlei Systeme der Zukunft gelegt – die Umsetzung in die Praxis kann einen wichtigen Beitrag für den sicheren Drohnenverkehr von morgen darstellen.
Crisis Prevention 2/2023
Patrick Philipp
Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB
Abteilung Interaktive Analyse und Diagnose IAD
Leiter Forschungsgruppe Decision Support Systems DSS
Fraunhoferstraße 1, 76131 Karlsruhe
E-Mail: patrick.philipp@iosb.fraunhofer.de











